О чем статья
Декартова система координат
 ,
,  ,
,  общей точки
общей точки  называют декартовой системой координат. Точка называется началом координат (см. на рис. 1).
называют декартовой системой координат. Точка называется началом координат (см. на рис. 1).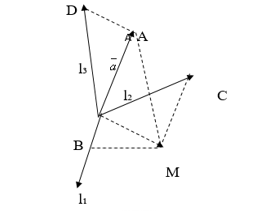
Рис. 1
Иногда такую систему называют косоугольной.
Нужна помощь в написании работы?
Мы - биржа профессиональных авторов (преподавателей и доцентов вузов). Наша система гарантирует сдачу работы к сроку без плагиата. Правки вносим бесплатно.
Прямоугольная декартова система координат
Прямоугольная система координат – это прямолинейная система, где взаимно перпендикулярны оси на плоскости или в пространстве. Такая система координат самая простая и поэтому часто используется
Среди декартовых систем, самая распространённая прямоугольная декартова система координат, которая бывает двух видов:
- прямоугольная декартова система координат на плоскости;
- прямоугольная система координат в пространстве.
Прямоугольная система координат на плоскости (двухмерная система координат)
Прямоугольная система координат на плоскости – это две взаимно перпендикулярные оси координат, которые пересекаются в точке (начало координат). Ещё такая система координат называется двухмерной. Есть ось  , которая направлена вправо и есть ось
, которая направлена вправо и есть ось  , которая направлена вертикально вверх.
, которая направлена вертикально вверх.
Координаты любых точек на плоскости  определяются двумя числами
определяются двумя числами  . Эти числа – ортогональные проекции точки на соответствующие координатные оси. Как правило,
. Эти числа – ортогональные проекции точки на соответствующие координатные оси. Как правило,  – абсцисса точки, а
– абсцисса точки, а  – ордината (см. рис. 2). Элементарно можно найти расстояние между этими двумя точками:
– ордината (см. рис. 2). Элементарно можно найти расстояние между этими двумя точками:
 и
и  расстояние на плоскости определяется выражением:
расстояние на плоскости определяется выражением:

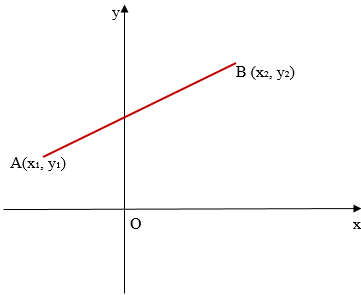
Рис. 2
Прямоугольная система координат в пространстве (трёхмерная система координат)
Прямоугольная система в пространстве – это три взаимно перпендикулярные оси  с общим началом в точке – началом координат. Ось называется осью абсцисс, – ось ординат,
с общим началом в точке – началом координат. Ось называется осью абсцисс, – ось ординат,  – ось аппликат.
– ось аппликат.
Координата любой точки в пространстве определяется тремя настоящими числами  . Часто такую систему называют: “прямоугольная система координат в трёхмерном пространстве”.
. Часто такую систему называют: “прямоугольная система координат в трёхмерном пространстве”.
Расстояние между двумя точками находится по формуле:

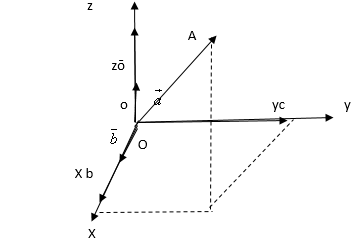
Рис. 3
Вместо произвольных базисных векторов , , удобнее взять единичные векторы  ,
,  ,
,  , направленные соответственно вдоль осей . Такие векторы называются ортами, а образованный ними базис называется ортонормированными (ортогональными). Вектор =
, направленные соответственно вдоль осей . Такие векторы называются ортами, а образованный ними базис называется ортонормированными (ортогональными). Вектор =  , который называется радиусом-вектором точки
, который называется радиусом-вектором точки  и у него такой расклад:
и у него такой расклад:

(3)
Очевидно, что произвольная точка  в заданной системе координат однозначно определяется своим радиусом-вектором , а координаты точки с координатами её радиуса-вектора.
в заданной системе координат однозначно определяется своим радиусом-вектором , а координаты точки с координатами её радиуса-вектора.
Обратим внимание на тот факт, что, если в предыдущих темах выражение “дан вектор” мы подразумевали его графическое (геометрическое) изображение, то теперь выражение “дан вектор” необходимо воспринимать как задание тройке упорядоченных числе  – координат вектора.
– координат вектора.
Решение задач
Задача
Убедиться, что система векторов  образует базис и найти координаты вектора
образует базис и найти координаты вектора  в этом базисе, если известны в прямоугольной системе координаты этих векторов:
в этом базисе, если известны в прямоугольной системе координаты этих векторов:  ,
,  ,
,  ,
,  .
.
Решение
Векторы  образуют базис, если они линейно независимы, то есть, их линейна комбинация
образуют базис, если они линейно независимы, то есть, их линейна комбинация  , где
, где  , только тогда, когда
, только тогда, когда 
Проверим это при помощи свойств с темы базиса:
 .
.
Приравнивая соответствующие координаты, получим систему:

Определитель этой системы:

Все вспомогательные определители  , так как в каждом из них есть нулевой столбец из свободных членов однородной системы. Значит, согласно формулам Крамера
, так как в каждом из них есть нулевой столбец из свободных членов однородной системы. Значит, согласно формулам Крамера  , и, таким образом, векторы
, и, таким образом, векторы  – линейно независимы, а значит, создают новый базис.
– линейно независимы, а значит, создают новый базис.
Обратим внимание, что элементы столбцов определителя  совпадают с соответствующими координатами векторов .
совпадают с соответствующими координатами векторов .
Вывод. Если определитель, созданный из координат векторов , не равен нулю, тогда эти векторы линейно независимы, то есть создают базис.
Теперь найдём координаты вектора в базисе , то есть найдём числа  , такие, что выполняют равенство:
, такие, что выполняют равенство:
 .
.
Повторяя предыдущие преобразования, у нас получается:

Приравнивая соответствующие координаты в левой и правой частях равенства, получим систему, которую удобно решать алгебраическим методом:

Таким образом, решив данную систему получим вектор 
