Часто в ВУЗе попадаются задачи по высшей математики, в которых необходимо вычислить определитель матрицы. К слову, определитель может быть только в квадратных матрицах. Ниже рассмотрим основные определения, какими свойствами обладает определитель и как его правильно вычислить.. Также на примерах покажем подробное решение.
О чем статья
Что такое определитель матрицы: вычисление определителя при помощи определения
Определитель матрицы
 второго порядка — это число
второго порядка — это число  .
.
Определитель матрицы обозначается  — (сокращенно от латинского названия детерминант), или
— (сокращенно от латинского названия детерминант), или  .
.
Если:, тогда получается 
Напомним ещё несколько вспомогательных определений:
[stextbox id=»info» defcaption=»true»]Упорядоченный набор чисел, который состоит из  элементов называется перестановкой порядка .[/stextbox]
элементов называется перестановкой порядка .[/stextbox]
Для множества, которое содержит элементов есть факториал (n), который всегда обозначается восклицательным знаком:  . Перестановки отличаются друг от друга всего лишь порядком следования. Чтобы вам было понятнее, приведём пример:
. Перестановки отличаются друг от друга всего лишь порядком следования. Чтобы вам было понятнее, приведём пример:
Рассмотрим множество из трёх элементов {3, 6, 7}. Всего перестановок 6, так как  .:
.:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

[stextbox id=»info» defcaption=»true»]Инверсия в перестановке порядка — это упорядоченный набор чисел (его ещё называют биекцией), где из них два числа образуют некий беспорядок. Это когда большее из чисел в данной перестановке расположено левее меньшего числа. [/stextbox]
Выше мы рассматривали пример с инверсией перестановки, где были числа  . Так вот, возьмём вторую строку, где судя по данным числам получается, что
. Так вот, возьмём вторую строку, где судя по данным числам получается, что  , а
, а  , так как второй элемент
, так как второй элемент  больше третьего элемента
больше третьего элемента  . Возьмём для сравнения шестую строку, где расположены числа:
. Возьмём для сравнения шестую строку, где расположены числа:  . Здесь есть три пары:
. Здесь есть три пары:  , а
, а  , так как
, так как  ;
;  , так как
, так как  ;
;  , —
, —  .
.
Саму инверсию мы изучать не будем, а вот перестановки нам очень пригодятся в дальнейшем рассмотрении темы.
[stextbox id=»info» defcaption=»true»] Определитель матрицы x — число:

 , где
, где
 — перестановка чисел от 1 до бесконечного числа
— перестановка чисел от 1 до бесконечного числа  , а
, а  — число инверсий в перестановке. Таким образом, в определитель входит слагаемых, которые называются «членами определителя». [/stextbox]
— число инверсий в перестановке. Таким образом, в определитель входит слагаемых, которые называются «членами определителя». [/stextbox]
Можно вычислять определитель матрицы второго порядка, третьего и даже четвёртого. Также стоит упомянуть: [stextbox id=»info» defcaption=»true»]
определитель матрицы — это число, которое равняется  [/stextbox]
[/stextbox]
Чтобы понять данную формулу, опишем её более подробно. Определитель квадратной матрицы x — это сумма, которая содержит слагаемых, а каждое слагаемое является собой произведением определённого количества элементов матрицы. При этом, в каждом произведении есть элемент из каждой строки и каждого столбца матрицы.
Перед определённым слагаемым может появится  в том случае, если элементы матрицы в произведении идут по порядку (по номеру строку), а количество инверсий
в том случае, если элементы матрицы в произведении идут по порядку (по номеру строку), а количество инверсий  в перестановке
в перестановке  множество номеров столбцов нечётно.
множество номеров столбцов нечётно.
Выше упоминалось о том, что определитель матрицы  обозначается или
обозначается или  , то есть, определитель часто называют детерминантом.
, то есть, определитель часто называют детерминантом.
Итак, вернёмся к формуле:
Из формулы видно, что определитель матрицы первого порядка — это элемент этой же матрицы  .
.
Нужна помощь в написании работы?
Написание учебной работы за 1 день от 100 рублей. Посмотрите отзывы наших клиентов и узнайте стоимость вашей работы.
Вычисление определителя матрицы второго порядка
Чаще всего на практике определитель матрицы решается методами второго, третьего и реже, четвёртого порядка. Рассмотрим, как вычисляется определитель матрицы второго порядка:

В матрице второго порядка  , отсюда следует, что факториал
, отсюда следует, что факториал  . Прежде чем применить формулу
. Прежде чем применить формулу
 необходимо определить, какие данные у нас получаются:
необходимо определить, какие данные у нас получаются:
1. ;
2. перестановки множеств:  и
и  ;
;
3. количество инверсий в перестановке :  и
и  , так как
, так как  ;
;
4. соответствующие произведения  :
:  и
и  .
.
Получается:

Исходя из вышесказанного мы получаем формулу для вычисления определителя квадратной матрицы второго порядка, то есть  x :
x :

Рассмотрим на конкретном примере, как вычислять определитель квадратной матрицы второго порядка:
[stextbox id=’warning’ caption=»Пример»]
Задача
Вычислить определитель матрицы x :

Решение
Итак, у нас получается  ,
,  ,
,  ,
,  .
.
Для решения необходимо воспользоваться ранее рассмотренной формулой:

Подставляем числа с примера и находим:

Ответ
Определитель матрицы второго порядка =  .
.
[/stextbox]
Вычисление определителя матрицы третьего порядка: пример и решение по формуле
[stextbox id=»info» defcaption=»true»]
Определитель матрицы третьего порядка — это число, полученное из девяти заданных чисел, расположенных в виде квадратной таблицы,[/stextbox]
Определитель третьего порядка находится почти так же, как и определитель второго порядка. Разница лишь в формуле. Поэтому, если хорошо ориентироваться в формуле, тогда и проблем с решением не будет.
Рассмотрим квадратную матрицу третьего порядка  * :
* :

Исходя из данной матрицы, понимаем, что  , соответственно, факториал = , а это значит, что всего перестановок получается
, соответственно, факториал = , а это значит, что всего перестановок получается
Чтобы применить правильно формулу  , необходимо найти данные:
, необходимо найти данные:
Итак, всего перестановок множества  :
:
.  , количество инверсий в перестановке , а соответствующие произведения =
, количество инверсий в перестановке , а соответствующие произведения =  ;
;
.  , количество инверсий в перестановке
, количество инверсий в перестановке  , соответствующие произведения =
, соответствующие произведения =  ;
;
.  , инверсий в перестановке
, инверсий в перестановке  , соответствующие произведение =
, соответствующие произведение =  ;
;
 .
.  ; инверсий в перестановке
; инверсий в перестановке  , соответствующие произведение =
, соответствующие произведение = 
 .
.  ; инверсий в перестановке
; инверсий в перестановке  , соответствующие произведение =
, соответствующие произведение = 
.  ; инверсий в перестановке
; инверсий в перестановке  , соответствующие произведение =
, соответствующие произведение =  .
.
Теперь у нас получается:

Таким образом у нас получена формула для вычисления определителя матрицы порядка x :
 .
.
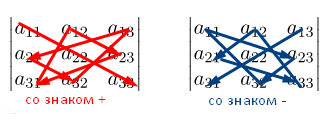
Нахождение матрицы третьего порядка по правилу треугольника (правило Саррюса)
Как говорилось выше, элементы определителя 3-го порядка расположены в трёх строках и трёх столбцах. Если ввести обозначение общего элемента  , тогда первый элемент обозначает номер строки, а второй элемент из индексов — номер столбца. Есть главная (элементы
, тогда первый элемент обозначает номер строки, а второй элемент из индексов — номер столбца. Есть главная (элементы  ) и побочная (элементы
) и побочная (элементы  ) диагонали определителя. Слагаемые в правой части называются членами определителя).
) диагонали определителя. Слагаемые в правой части называются членами определителя).
Видно, что каждый член определителя находится в схеме только по одному элементу в каждой строке и каждого столбца.
Вычислять определитель можно при помощи правила прямоугольника, который изображён в виде схемы. Красным цветом выделены члены определителя из элементов главной диагонали, а также члены из элементов, которые находятся в вершине треугольников, что имеют по одной стороне, параллельны главной диагонали (лева схема), беруться со знаком  .
.
Члены с синими стрелками из элементов побочной диагонали, а также из элементов, которые находятся в вершинах треугольников, что имеют стороны, параллельные побочной диагонали (правая схема) берутся со знаком  .
.
На следующем примере научимся, как вычислять определитель квадратной матрицы третьего порядка.
[stextbox id=’warning’ [stextbox id=’warning’ caption=»Пример»]
Задача
Вычислить определитель матрицы третьего порядка:

Решение
В этом примере:
 ,
,  ,
,  ,
,
 ,
,  ,
,  ,
,
 ,
,  ,
,  .
.
Вычисляем определитель, применяя формулу или схему, которые рассматривались выше:

Ответ
Определитель матрицы третьего порядка = 
[/stextbox]
Рекомендуем запомнить формулы для нахождения определителя матрицы второго и третьего порядка, так как они часто применяются на зачётах и экзаменах.
Основные свойства определителей матрицы третьего порядка
На основании предыдущих определений и формул рассмотрим основные свойства определителя матрицы.
1. Размер определителя не изменится при замене соответствующих строк, столбцов (такая замена называется транспонированием).

На примере убедимся, что определитель матрицы равен определителю транспонированной матрицы:

Вспомним формулу для вычисления определителя: 
Транспонируем матрицу:

Вычисляем определитель транспонированной матрицы:

Мы убедились, что определитель транспортированной матрицы равен исходной матрице, что говорит о правильном решении.
2. Знак определителя изменится на противоположный, если в нём поменять местами любые два его столбца или две строки.
Рассмотрим на примере:
Даны две матрицы третьего порядка ( x ):


Нужно показать, что определители данных матриц противоположные.
Решение
В матрице и в матрице  поменялись строки (третья с первой, и с первой на третью). Согласно второму свойству определители двух матриц должны отличаться знаком. То есть, одна матрица с положительным знаком, а вторая — с отрицательным. давайте проверим данное свойство, применив формулу для вычисления определителя.
поменялись строки (третья с первой, и с первой на третью). Согласно второму свойству определители двух матриц должны отличаться знаком. То есть, одна матрица с положительным знаком, а вторая — с отрицательным. давайте проверим данное свойство, применив формулу для вычисления определителя.


Свойство верно, так как  .
.
3. Определитель равняется нулю, если в нём есть одинаковые соответствующие элементы в двух строках (столбцах). Пусть у определителя одинаковые элементы первого и второго столбцов:

Поменяв местами одинаковые столбцы, мы, согласно свойству 2 получим новый определитель:  =
=  . С другой стороны, новый определитель совпадает с изначальным, поскольку одинаковые ответы элементы, то есть =
. С другой стороны, новый определитель совпадает с изначальным, поскольку одинаковые ответы элементы, то есть =  . Из этих равенств у нас получается: =
. Из этих равенств у нас получается: =  .
.
4. Определитель равняется нулю, если все элементы одной строки (столбца) нули. Это утверждение выплывает из того, что у каждого члена определителя по формуле (1) есть по одному, и только по одному элементу с каждой строки (столбца), у которого одни нули.
Рассмотрим на примере:
Покажем, что определитель матрицы равен нулю:

В нашей матрицы есть два одинаковых столбца (второй и третий), поэтому, исходя из данного свойства, определитель должен равняться нулю. Проверим:

И действительно, определитель матрицы с двумя одинаковыми столбцами равняется нулю.
5. Общий множитель элементов первой строки (столбца) можно вынести за знак определителя:
 .
.
6. Если элементы одной строки или одного столбца определителя пропорциональны соответствующим элементам второй строки (столбца), тогда такой определитель равняется нулю.
Действительно, за свойством 5 коэффициент пропорциональности можно вынести за знак определителя, и тогда воспользоваться свойством 3.
7. Если каждый из элементов строк (столбцов) определителя является суммой двух слагаемых, то этот определитель можно подать в виде суммы соответствующих определителей:
 .
.
Для проверки достаточно записать в развёрнутом виде по (1) определитель, что в левой части равенства, тогда отдельно сгруппировать члены, в которых содержатся элементы  и
и  .Каждая из полученных групп слагаемых будет соответственно первым и вторым определителем с правой части равенства.
.Каждая из полученных групп слагаемых будет соответственно первым и вторым определителем с правой части равенства.
8. Значения определения не изменятся, если к элементу одной строки или одного столбца прибавить соответствующие элементы второй строки (столбца), умноженные на одно и то же число:
 .
.
Это равенство получается исходя из свойств 6 и 7.
9. Определитель матрицы  ,
,  ,
,  равняется сумме произведений элементов какой-либо строки или столбца на их алгебраические дополнения.
равняется сумме произведений элементов какой-либо строки или столбца на их алгебраические дополнения.

Здесь по  подразумевается алгебраическое дополнение элемента матрицы
подразумевается алгебраическое дополнение элемента матрицы  . При помощи данного свойства можно вычислять не только матрицы третьего порядка, но и матрицы более высших порядков ( x или x ).Другими словами — это рекуррентная формула, которая нужна для того, чтобы вычислить определитель матрицы любого порядка. Запомните её, так как она часто применяется на практике.
. При помощи данного свойства можно вычислять не только матрицы третьего порядка, но и матрицы более высших порядков ( x или x ).Другими словами — это рекуррентная формула, которая нужна для того, чтобы вычислить определитель матрицы любого порядка. Запомните её, так как она часто применяется на практике.
Стоит сказать, что при помощи девятого свойства можно вычислять определители матриц не только четвёртого порядка, но и более высших порядков. Однако, при этом нужно совершать очень много вычислительных операций и быть внимательным, так как малейшая ошибка в знаках приведёт к неверному решению. Матрицы высших порядков удобнее всего решать методом Гаусса, и об этом поговорим позже.
10. Определитель произведения матриц одного порядка равен произведению их определителей.
Рассмотрим на примере:
[stextbox id=’warning’ [stextbox id=’warning’ caption=»Пример»]
Задача
Убедитесь, что определитель двух матриц и равен произведению их определителей. Даны две матрицы:


Решение
Сначала находим произведение определителей двух матриц и .


x  =
=  ,
,
Теперь выполним умножение обеих матриц и таким образом, вычислим определитель:




Ответ
Мы убедились, что 
[/stextbox]
Вычисление определителя матрицы при помощи метода Гаусса
Вспомним, как метод Гаусса помогает находить определитель матрицы: благодаря элементарным преобразованием в матрице все элементы (кроме  ) нужно привести к нулю. Однако, такой метод подходит только к тем матрицам, в которых определитель отличен от нуля. Об этом поговорим позже, а сейчас объясним, для чего проделывается такая процедура.
) нужно привести к нулю. Однако, такой метод подходит только к тем матрицам, в которых определитель отличен от нуля. Об этом поговорим позже, а сейчас объясним, для чего проделывается такая процедура.
Нулевые элементы необходимы для того, чтобы самым простым способом разложить определитель, исходя из элементов первого столбца. После такого преобразования, исходя из девятого свойства и  , получается:
, получается:
 .
.
Здесь  — это минор первого порядка, который получился из матрицы путём вычёркивания элементов первой строки и первого столбца. Такая процедура проделывается до тех пор, пока все элементы первого столбца не превратятся в нулевые элементы.
— это минор первого порядка, который получился из матрицы путём вычёркивания элементов первой строки и первого столбца. Такая процедура проделывается до тех пор, пока все элементы первого столбца не превратятся в нулевые элементы.
Конечно же, сразу же назревает вопрос: «А как же получается нулевые элементы?» Рассмотрим алгоритм решения:
Если первый элемент в первой строке и в первом столбце  прибавить к соответствующим элементом — ой строки, где
прибавить к соответствующим элементом — ой строки, где  . (Метод Гаусса не нужен только в том случае, если все элементы в первом столбцы нулевые). После данного преобразования «новый» элемент матрицы
. (Метод Гаусса не нужен только в том случае, если все элементы в первом столбцы нулевые). После данного преобразования «новый» элемент матрицы  . Определитель «новой» матрицы равен определителю исходной матрицы.
. Определитель «новой» матрицы равен определителю исходной матрицы.
Если , тогда к каждому элементу второй строки прибавляем элемент первой строки, которые заранее умноженные на  , а к элементам третьей строки прибавляем определённые элементы первой строки, которые умножаются на
, а к элементам третьей строки прибавляем определённые элементы первой строки, которые умножаются на  . И дальше вычисляем по такой же схеме. Метод Гаусса рассмотрен более подробно в отдельно теме. В итоге получится преобразованная матрица, где все элементы первого столбца окажутся нулевыми. Определитель полученной матрицы будет равен определителю изначальной матрицы.
. И дальше вычисляем по такой же схеме. Метод Гаусса рассмотрен более подробно в отдельно теме. В итоге получится преобразованная матрица, где все элементы первого столбца окажутся нулевыми. Определитель полученной матрицы будет равен определителю изначальной матрицы.
Напомним, что величина определителя — ого порядка равна сумме произведений элементов какой-либо строки или столбца на соответствующее алгебраическое дополнение.
Рассмотрим записанный сначала формально определитель четвёртого порядка:

Вычёркивая в  — тую строку и
— тую строку и  — тый столбец, на пересечении которого помещается элемент
— тый столбец, на пересечении которого помещается элемент  , получим определитель третьего порядка, который называется минором элемента и обозначается
, получим определитель третьего порядка, который называется минором элемента и обозначается  . Тогда
. Тогда  — алгебраическое дополнение элемента . Определитель 4-го порядка можно обозначить, как размещение по элементам, например, первого столбца:
— алгебраическое дополнение элемента . Определитель 4-го порядка можно обозначить, как размещение по элементам, например, первого столбца:

Пусть введено понятие определителя  — ого порядка, тогда определитель — ого порядка:
— ого порядка, тогда определитель — ого порядка:

Можно изобразить, как размещение по элементам первого столбца:
 ,
,
где  — алгебраические дополнения, а
— алгебраические дополнения, а  — миноры элементов первого столбца. Последние и есть определители — го порядка.
— миноры элементов первого столбца. Последние и есть определители — го порядка.
Чтобы было более понятно, разберём матрицу четвёртого порядка, где нужно найти определитель:
Разберём на примере:
[stextbox id=’warning’ [stextbox id=’warning’ caption=»Пример 4″]
Задача
Нужно вычислить определитель матрицы высшего порядка x :

Решение
Сначала вспомним тему про определители третьего порядка и превратим в нули элементы 1-го столбца, которые принадлежат 2, 3, 4 строкам. Для этого прибавим соответствующие элементы 1 и 2 строк. На месте элементов  получим
получим  ,
,  ,
,  ,
,  .
.
Чтобы получить в 3 строке 1-го столбца, умножим на  элементы 1-ой строки и прибавим к соответствующим элементам третьей строки:
элементы 1-ой строки и прибавим к соответствующим элементам третьей строки:




Умножим элементы 1-ой строки на  и добавим к соответствующим элементам 4-ой строки. Получается:
и добавим к соответствующим элементам 4-ой строки. Получается:




Изначальный определитель впоследствии преобразований получается:

Дальше раскладываем последний определитель за элементами 1-го столбца. Поскольку , а остальные элементы 1-го столбца нули, тогда получим один определитель 3-го порядка.

Ответ
Определитель матрицы четвёртого порядка = .
[/stextbox]
Вычисление определителя матрицы при помощи теоремы Лапласа
Теорема Лапласа — это глубокое разложение определителя по элементам. При помощи данной теоремы можно решать матрицы не только третьего порядка, но и более высших порядков.
Напомним — минор — это определитель матрицы, который составлен методом вычёркивания — той строки и — того столбца. А алгебраическое дополнение — соответствующий минор, который берётся со знаком минус  . Знаки же зависят от места элемента в определителе и определяются по схеме:
. Знаки же зависят от места элемента в определителе и определяются по схеме:

Приведём пример решения алгебраических дополнений по схеме:
[stextbox id=’warning’ caption=»Пример»]
Задача
Найти алгебраические дополнения элементов определителя:

Решение



[/stextbox]
Понятия алгебраического дополнения даёт возможность ещё одного способа определения определителя, который утверждается теоремой Лапласа (про распределение определителя):
[stextbox id=»teorema» defcaption= «true»]
Определитель равняется сумме произведения элементов строк (столбца) на их алгебраические дополнения. Например,
 . — это равенство проверяется непосредственно
. — это равенство проверяется непосредственно

[/stextbox]
Заметно, как последнее выражение совпадает с выражением из правила треугольника (правила Саррюса). Давайте по теореме Лапласа разберём несколько примеров:
[stextbox id=’warning’ caption=»Пример»]
Задача
Вычислить определитель матрицы, разложив его за элементами третьего порядка:

Решение

Ответ
 .
.
[/stextbox]
Заключение
Итак, определитель квадратной матрицы — это число, полученное при помощи заданных чисел, расположенных в виде квадратной таблицы,которое вычисляется по рассмотренным выше формулам. Мы рассмотрели три основных способа вычисления определителя:
- через сумму двух произведений сочетаний элементов квадратной матрицы;
- по правилу разложения определителя по элементам строк (столбцов) квадратной матрицы;
- по методу Гаусса, когда матрицу нужно привести к треугольному виду.
Также были рассмотрены формулы для решения матрицы второго, третьего и высших порядков.
Мы разобрали 10 свойств определителя матриц, благодаря которым можно быстрее и легче найти определитель матрицы.
Удобно решать матрицу третьего порядка методом Гаусса, где нужно выполнить элементарные преобразования матрицы и привести её к ступенчатому виду. Определитель матрицы равняется произведению элементов, которые стоят на главной диагонали.
Полезная литература